4.5.1.3.1. CAN Subsystem
4.5.1.3.1.1. Common Information
Soda Vehicle provides the ability to create virtual CAN networks with access to real physical CAN interfaces, as well as tools for serialization/deserialization of CAN messages based on DBC files.
There are two basic components for creating CAN networks - UCANBusComponent and UCANDevComponent.
UCANBusComponent is designed to create virtual CAN networks inside a vehicle, and UCANDevComponent is a bridge connecting one UCANBusComponent with any external device.
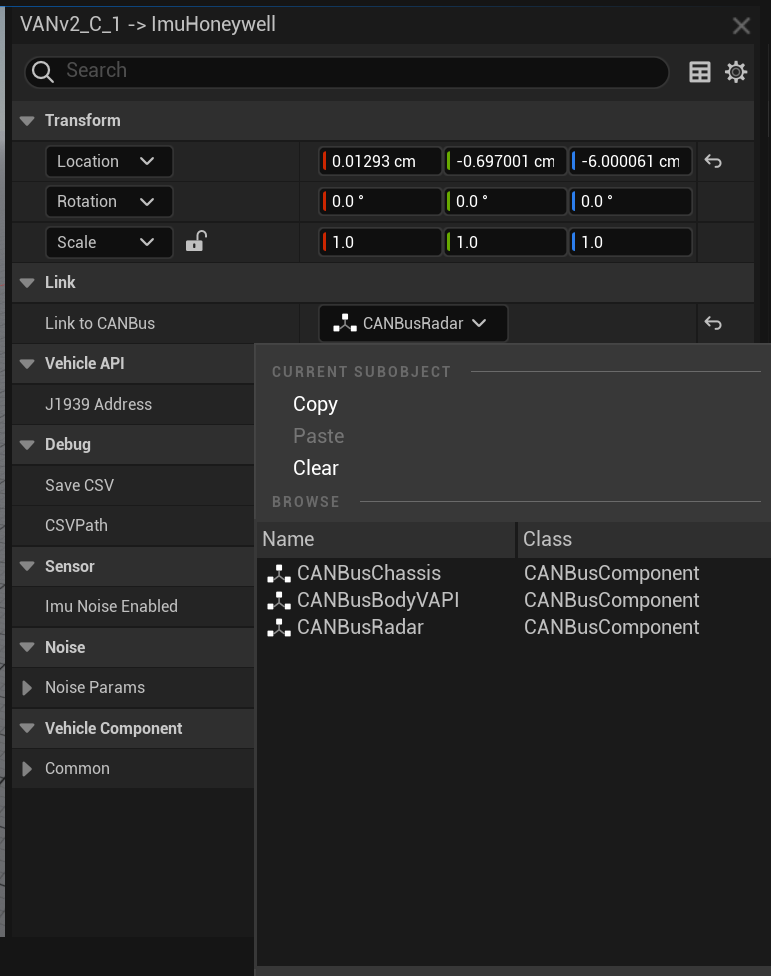
Typically, devices that are supposed to connect to one or more CAN buses have a corresponding item in the component settings, where you need to select one of the previously added UCANBusComponents. In this way, any component is connected to the virtual CAN bus (UCANBusComponent).
If there is a need to connect a virtual CAN bus to a real CAN bus, then you need to use one of the UCANDevComponents. It connects a virtual CAN bus to some real device (but not necessarily).
There are the following implementations of UCANDevComponent:
CANDevSocketCAN - connects to the SocketCAN Linux subsystem. Available for Linux only.
CANDevPCANComponent - connects to the USB-PCAN adapter (FD, PRO). Available for Windows only
CANDevKvaserComponent - connects to the USB-CAN Kvaser adapter. Available for Windows only.
CANDevEthernetComponent - implements the SocketCanD protocol to implement CAN via Ethernet transport.